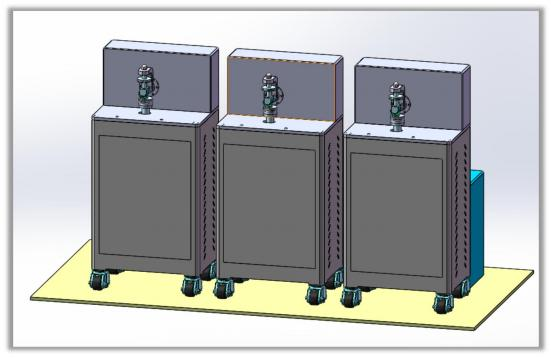
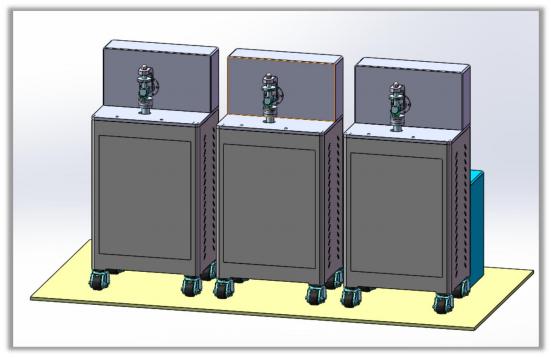
HH3膝関節摩耗試験機は、試験ホスト、治具、電子制御部の 3 つの部分で構成されています。膝インプラントの磨耗、疲労、剥離やその他の損傷プロセスをシミュレートでき、同時に 3 つの膝関節のインプラントをテストできます。

1 .1 機能
HH3 膝関節摩耗試験機は、試験ホスト、治具、電子制御部の 3 つの部分で構成されています。膝インプラントの磨耗、疲労、剥離、その他の損傷プロセスをシミュレートでき、同時に 3 つの膝関節のインプラントをテストできます。試験力、試験時間、速度を自動制御し、試験力とトルクをリアルタイムに測定する試験機です。人工膝関節やその他の関連医療分野の製造、使用、研究に応用できます。
スピンドルドライブは輸入された AC サーボモーターと制御システムを採用しており、無段階速度調整と必要な速度範囲内の一定トルク/一定軸力出力を実現できます。試験力はネジバネ負荷システムを使用して適用されます。試験力は安定して確実に加えられ、試験力はオペレータがコンピュータ インターフェースで設定できます。スピンドル速度、回転数、試験力、試験時間などのパラメータはすべてコンピュータによって制御され、リアルタイムで試験データを収集してプロットすることができます。対応するテスト曲線を作成でき、テストデータまたは曲線を自由に保存、取得、印刷できます。
関節 AP、回転、屈曲、外転、その他の動きを完了するためのさまざまなコンポーネントを備えた 3 方向サーボ モーター駆動の負荷システム。4 コンポーネントの力センサー モジュールは、トルクの軸力、水平方向の推力、屈曲をそれぞれテストします。伸展時のトルク、高精度ロータリーエンコーダ、リアルタイム角度測定、変位を備えた 3 ウェイ サーボ アセンブリは、ホスト コンピュータ制御のための効果的なデータ ソースを提供します。
各動作機構は独立して制御および調整され、3 つのステーションと 15 軸で関節コンポーネントの研削損傷テストを完了します。
1.2 主要仕様
1. 中国語の操作インターフェースを備えた機器操作ソフトウェア。
2. ソフトウェアを実行する機器はすぐに使用できるため、特別なソフトウェアは必要ありません。
3. 自由度: 各テスト ステーションは、屈曲/伸展、内旋/外旋、前進/後進、3 次元運動制御、および軸力負荷を実現でき、各自由度は制御されている。センサーと力の両方が検出されます。内外方向、内外方向への自由な移動が可能です。
4. センサーの非直線性はフルスケールの 0.10% 以下、ヒステリシスは 0.10% 以下、再現性はフルスケールの 0.05% 以下です。
5. 変位および変位センサー範囲: 軸変位 100mm、屈曲/伸展 120、内旋/外旋 20、前方/後方変位 15mm、内側/外側変位 5mm、内反/外反。
6. 負荷容量と力センサー範囲: アキシアル荷重 3KN、内外トルク 20Nm、前方/後方荷重 1KN。
7. 力と変位の制御精度: 1 サイクル内の力と変位の振幅の誤差は、指定された最大値を超えてはなりません。最大位相誤差は、全サイクルの 3% を超えてはなりません。この機器は、ISO 14243-1 および ISO 14243-3 に従って、制御可能な各自由度でテストされます。力センサーと変位センサーの測定曲線と偏差値。
8. 8 チャンネルのアナログ入力機能を備え、外部データとの同期が可能です。
9. テスト周波数: 1Hz、精度 0.1Hz。
10. 制御システム: 力と変位の閉ループ自動制御を実現するには、別個のマルチステーション、マルチチャネル サーボ コントローラーを装備する必要があります。
11. コントローラーは、周期波形が制御命令として使用される場合に、信号が必要とするピーク値に正確に到達できることを保証するために、ピークツーバレー値制御補償を実行できなければなりません。
12. カスタム歩行曲線のプログラミング テストを実装できる必要があります。制御可能な各自由度を段階的に手動制御できる。生データを Excel 形式でエクスポートできます。
13. テスト中、ソフトウェアは各ステーションの力と変位曲線、および制御システムをリアルタイムで反映できる必要があります。 システムは、手動介入なしでサンプルのモーション カーブをターゲット カーブに一致するように自動的に調整できる必要があります。
14. リアルタイム閉ループ制御レート ≤ 6kHz 、力および変位制御モードを除き、コントローラーは計算された変数制御モードを実装できる必要があります。
15. デジタル サンプリング周波数は 100 kHz 未満であってはならず、サンプリング方法には、ピーク値、谷値、時間、最大値、最小値、平均値、サイクル / 対数などが含まれている必要があります。
16. デュアルモード、チャネルフィードバック制限チャネルコマンド動作モードがあります。
17. センサーの励磁抜けを自己チェックする機能があります。
18. 温度: 潤滑媒体温度は (37 ℃) に維持でき、温度制御システムがあります。
19. 潤滑媒体 : 接合面は潤滑媒体に浸すことができ、潤滑媒体は漏れなく密封される必要があります。漏洩監視装置を備えています。
20. テストコンポーネント: テスト、ワークステーションのロード、およびすべての動作のロードに必要なツールが装備されています。浸漬ワークステーションは、機器の校正とトラブルシューティングのための参照標準サンプルを提供します。
21. 緊急停止ボタン: 機器には緊急停止ボタンが装備されている必要があります。
22. 安全保護: 機器には、透明な熱可塑性ポリカーボネート素材の保護カバーが装備されている必要があります。安全インターロック装置が付いています。保護カバーのドアが開くと、装置は自動的にテストを停止できる必要があります。
1.3 労働条件
室温 10℃~35℃の範囲内
相対湿度は 80% 以下です。
強固な基礎に適切に設置。
振動、腐食性媒体、強い電磁界干渉のない清潔な環境。
電源電圧の変動幅は定格電圧  10% を超えてはなりません。
10% を超えてはなりません。
2. 構造組成
試験機は、スピンドル駆動システム、サンプルローディングシステム、軸力の 3 つのワークステーションに分かれています。3 つのワークステーションは同じスピンドルドライブを共有します。ダイナミックシステムとソフトウェア制御システム。
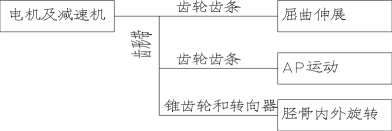
2.1 スピンドル駆動システム
軸モーターには、Panasonic AC サーボ統合速度制御システムとモーターが使用されています。モーターの最大出力は 7.5 Kw で、その出力は 3 つの出力ラインに分割されます。
1 つ目: ギア ラック、電磁クラッチ、トルク センサーの後に、大腿骨の回転振り子になります。電磁クラッチは電源のオンとオフの制御を担当し、トルク センサーは電源のオン/オフを制御します。トルクを測定しています。運転中のトルクを測定します。
2 つ目: 歯付きベルトとギア ラックを通過した後、左右の往復並進となり、サンプル AP の移動を駆動します。
3 番目: 歯付きベルト、ベベル ギア、ステアリング ギアを介して、脛骨の回転スイングに変換され、サンプルが内外に回転します。
感染経路は下図のとおりです。
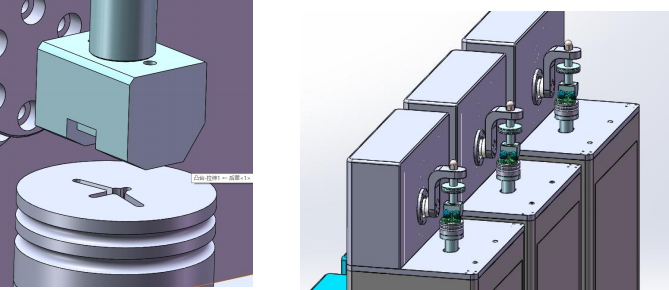
2.2 サンプル読み込みシステム
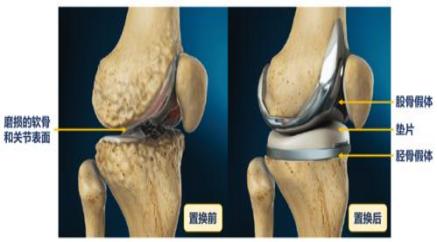
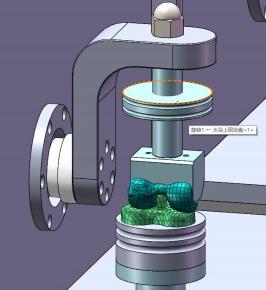
標本ローディング システムは、膝関節のインプラント コンポーネントに対して人間の条件下での動きの自由度をシミュレートします。取り付けられ、固定されます。取り付けシート、スライド シート、ナイロン シート、ローラー、スライド スリーブなどで構成されます。
具体的な実装は次のとおりです:
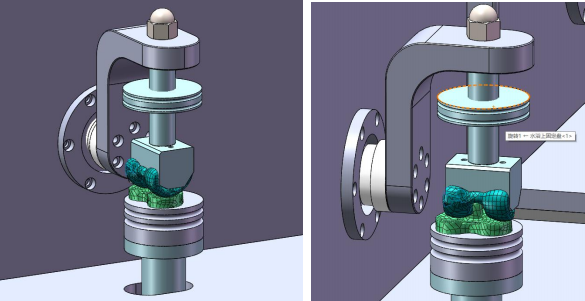
膝関節摩耗ツールの取り付けは比較的複雑です。図面に従って厳密に取り付けてください。また、対応チャンネルも付属しております。
配線を接続するときは、対応する線番を使用してください。
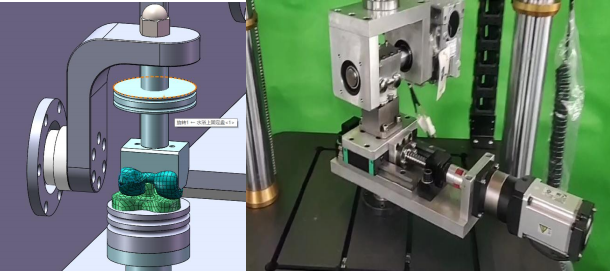
(図に示されている構造は、動きの原理を説明するためにのみ使用されており、実際のオブジェクトが優先されます)
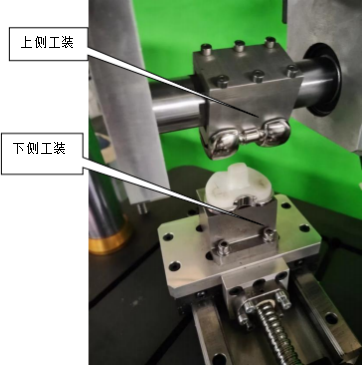

(図に示されている構造は、動きの原理を説明するためにのみ使用されており、実際のオブジェクトが優先されます)
テスト要件を満たすには、サンプルに従って上部と下部の工具を再加工する必要があります。 (商品ごとにサイズ詳細が異なります)

6. チャンネルの選択と関連する調整
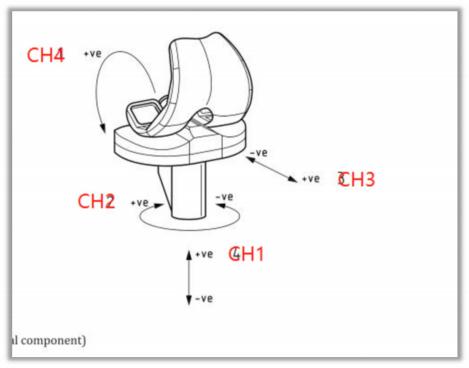
上の図と組み合わせて、チャネルをチェックしてどのチャネルが動作しているかを確認します。 ISO 14243.3 を実行する場合は、1-4 アイルを選択します。チャネル 5 は、後続のアップグレード用の拡張チャネルです。他の単軸または二軸実験の場合は、対応するチャネルを選択してください。
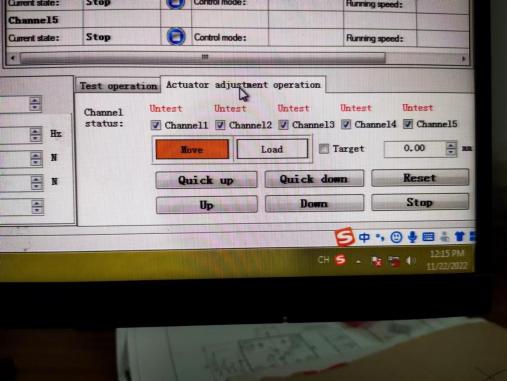
クイックアップ/アップ = 高速読み込み/読み込み
クイックダウン/ダウン = クイックダウン/ダウン
7. ISO 14243.3 に対応して、図に示すように制御波形をインポートする必要があります:
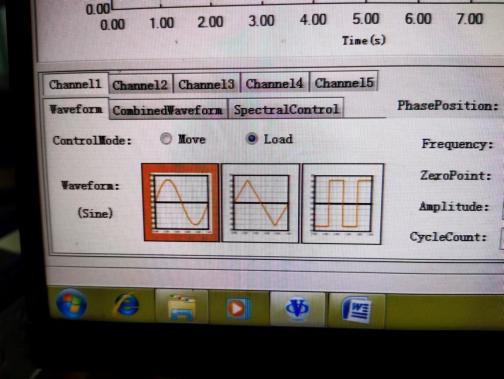
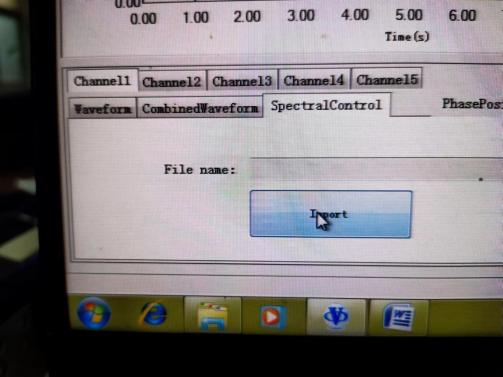
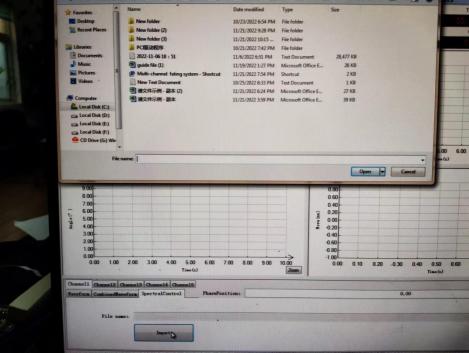
工場出荷時にプリセットされた波形を選択します。新しい波形またはアクションを設定する必要がある場合は、このファイルで行うことができます。変更して別名で保存します。
各チャンネルの詳細な調整については、シングルチャンネル ソフトウェアのマニュアルを参照してください。
8. 保護について:
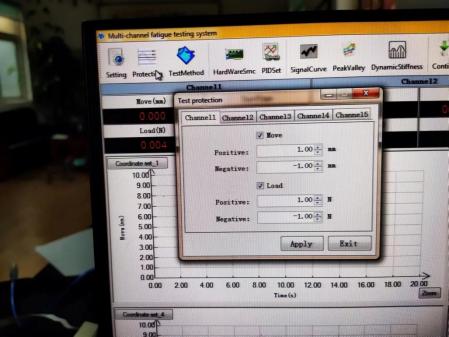
[開始] をクリックした後、テストが動かないか、実行できません。保護オプションで許容範囲外に設定されているパラメータがあるかどうかを確認してください。
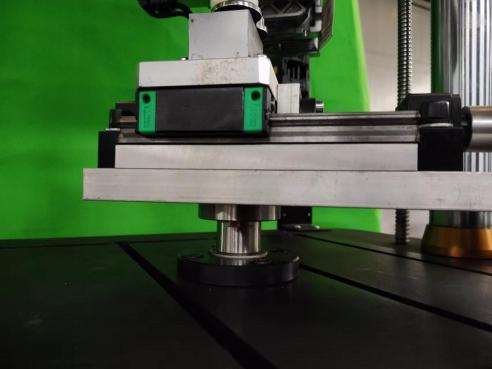
2.3 軸力荷重システム
本機はスプリングローディング構造を採用しています。ローディング機構はステッピング モーターによって駆動され、そのステッピング モーターは円弧歯付きベルト、同期プーリー、精密ボールねじペアを介して伝達され、精密直線運動ガイド レールによってガイドされて力付与シートを駆動します。力を加えるシートは、バネが圧縮された後にスライド プラットフォームに力を加えるバネ仕掛けの機構で固定されています。ローラー試験片の摩擦面間の試験力が形成されます。モーターを制御してフォースシートを駆動し、空間内を前後に移動させる、つまり試験力の印加と大きさを制御することができます。荷重センサーは着力座の面に設置されています。力の信号を収集します。直線運動ベアリングガイドにより、試験力の適用と安定性が保証されます。バネ式部分 乗せ降ろしが簡単です。
試験力の負荷が開始されると、センサーは設定圧力をマイコン制御システムに入力し、その設定圧力がマイコンによって制御され、システム圧力が設定圧力と釣り合うまでモーターが逆回転します。
2.4 負荷ソーキング システム
浸漬液ボックス、ヒーター、温度センサー、蠕動ポンプ、シリコンチューブなどの
試料の実寸に合わせて円筒端面に位置決め穴を加工でき、クランプ角度も調整可能です。角度を調整したら、左側の位置決めスライダーをロックします。



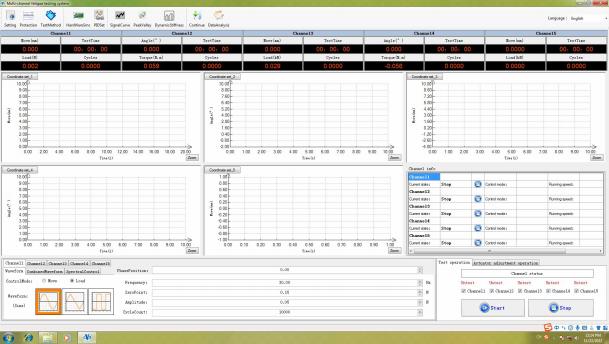
2.5 ソフトウェア制御システム
制御システムは制御マシンにインストールされ、通信ケーブルを介してテスト ホストに接続されます。ソフトウェアの動作環境はWINDOWS XPです。制御ソフトウェアは、グラフィカルな対話型操作インターフェイスであり、システムの開始と停止、動作速度、負荷力、浸漬液の温度を制御するための命令を送信し、軸力、トルク、温度、試験時間などのシステム動作データを収集する役割を果たします。 、テスト中など。計算と処理の後、試験力-時間、トルク-時間、その他のデータ曲線がグラフの形式で出力されます。
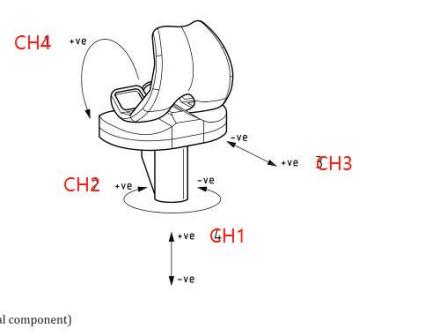
上の図と組み合わせて、チャネルをチェックして、どのチャネルが動作しているかを確認します。 ISO 14243.3 を実行する場合、1 ~ 4 チャネルを選択します。5 t このチャネルは、後続のアップグレード用の拡張チャネルです。他の単軸または二軸実験の場合は、対応するチャネルを選択してください。
クイックアップ/アップ = 高速読み込み/読み込み
クイックダウン/ダウン = 高速アンインストール/アンインストール
7. ISO 14243.3 に対応して、図に示すように制御波形をインポートする必要があります:
工場であらかじめ作成された波形を選択します。新しい波形またはアクションを設定する必要がある場合は、このファイルで変更できます。別名で保存してください。
各チャンネルの詳細な調整については、シングルチャンネル ソフトウェア マニュアルを参照してください。
8. 保護について:
[開始] をクリックした後、テストが動かないか、実行できません。保護オプションで許容範囲外に設定されているパラメータがあるかどうかを確認してください。